Системы отсчета координат
Системы координат и системы отсчёта
В инерциальной и спутниковой навигации используется несколько различных систем координат и систем отсчёта. Для корректной интерпретации положения и ориентации ИНС/ГНСС‑решения важно понимать, в какой системе описаны векторы и координаты, и как выполняются переходы между ними.
Инерциальные навигационные системы и курсовертикали (например, SSI‑NS122, SSI‑NS212, SSI‑NS3000, ИМ‑10К, SSAH‑RS220 и им подобные) работают с геодезическими, геоцентрическими и локальными навигационными системами координат, а также с корпусной системой, связанной с объектом.
Геоцентрическая система координат ECEF
Геоцентрическая система координат ECEF (Earth-Centered, Earth-Fixed) жёстко связана с Землёй. Начало координат располагается в центре масс Земли, ось Z направлена к северному полюсу, ось X — в точку пересечения экватора и нулевого меридиана, ось Y дополняет систему до правой троицы.
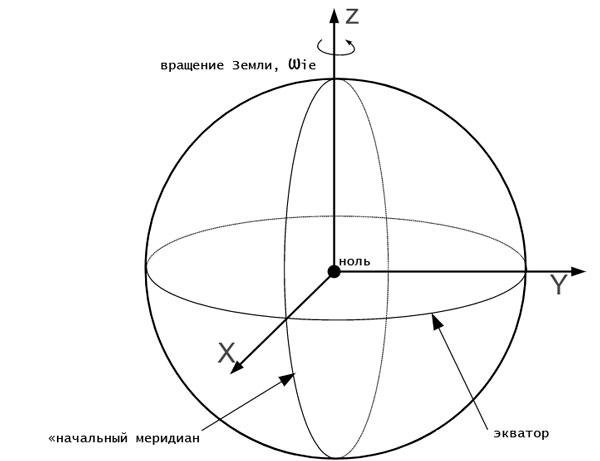
Вектор положения точки в ECEF описывается тройкой декартовых координат (X, Y, Z) в метрах. ГНСС‑приёмники и ИНС часто выполняют внутренние вычисления в этой системе, так как она удобна для строгих геодезических задач и глобальных преобразований.
Геодезические (географические) координаты
Геодезические координаты задают положение точки относительно опорного эллипсоида (как например в WGS84 – всемирная геодезическая система 1984 года) тремя параметрами: широта, долгота и высота над эллипсоидом. Это привычный формат записи координат для навигации и картографии.
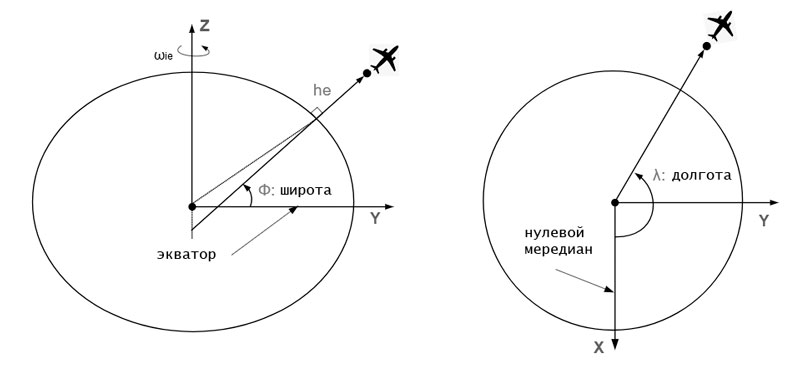
Инерциальные навигационные системы SENSSET (SSI‑NS122, SSI‑NS212, SSI‑NS3000) выдают положение именно в виде геодезических координат WGS84, что обеспечивает совместимость с ГНСС‑приёмниками и внешними навигационными системами.
Локальная навигационная система NED
Локальная система координат NED (North–East–Down) является касательной к поверхности Земли в заданной точке. Ось North направлена на геодезический север, ось East — на восток по касательной к меридиану, ось Down — вниз по нормали к эллипсоиду.
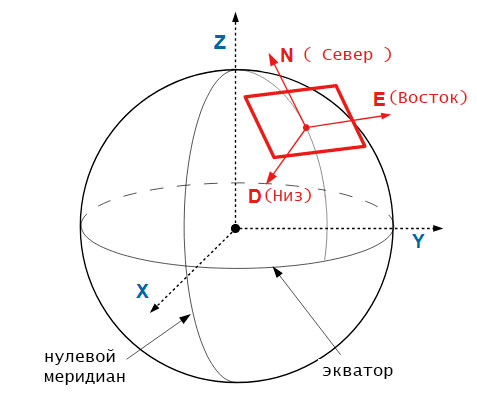
В этой системе удобно описывать движение объекта в окрестности текущего положения. ИНС решения SENSSET рассчитывают скорости и ускорения в базисе NED, а затем результаты преобразуются в геодезические координаты и другие выходные параметры навигационного решения.
Корпусная система координат (Body frame)
Корпусная система координат жёстко связана с носителем (объектом) и с инерциальным измерительным модулем. Обычно ось X направлена вперёд вдоль продольной оси объекта, ось Y — вправо, ось Z — вниз или вверх в зависимости от принятой ориентации в конкретном изделии.
Все первичные измерения модуля (ускорения и угловые скорости) выполняются в этой системе координат. Навигационный фильтр ИНС непрерывно использует ориентацию (крен, тангаж, курс или кватернион), чтобы преобразовывать векторы из корпусной системы в навигационную NED.
Преобразования между системами координат
Между различными системами координат выполняются стандартные преобразования. Для перехода между декартовой системой ECEF и геодезическими координатами (широта, долгота, высота) используются известные геодезические формулы. Для перехода между ECEF и локальной NED применяется матрица поворота, зависящая от широты и долготы точки.
Внутри инерциальной навигационной системы последовательность преобразований обычно выглядит так: измерения в корпусной системе → преобразование в NED с учётом ориентации → при необходимости переход в ECEF → представление результата в виде широты, долготы и высоты WGS84.
Продукты SENSSET, использующие эти системы
- Инерциальная навигационная система SSI‑NS122 (INS на МЭМС‑сенсорах):
- Высокоточная инерциальная навигационная система SSI‑NS212 (ВОГ + ГНСС, высокоточное решение в WGS‑84 и NED):
- Инерциальная навигационная система SSI‑NS3000 (INS+GNSS с расширенной математикой навигационных преобразований):
https://sensset.ru/wp-content/uploads/2024/03/SSI-NS3000.pdf
- Курсовертикали SSAH‑RS220 и ИМ‑10К (оценка ориентации в корпусной и навигационной системах координат):
