Инерциальная навигационная система (ИНС)
Что такое инерциальная навигационная система (ИНС)
Инерциальная навигационная система (ИНС) — это устройство, которое на основе триады гироскопов и акселерометров вычисляет ориентацию, скорость и положение объекта в пространстве, формируя полноценное навигационное решение по шести степеням свободы.
ИНС особенно эффективна для краткосрочной автономной навигации, когда необходимо получать данные с высокой частотой и без задержек, независимо от внешних радиосигналов.
Принцип работы ИНС
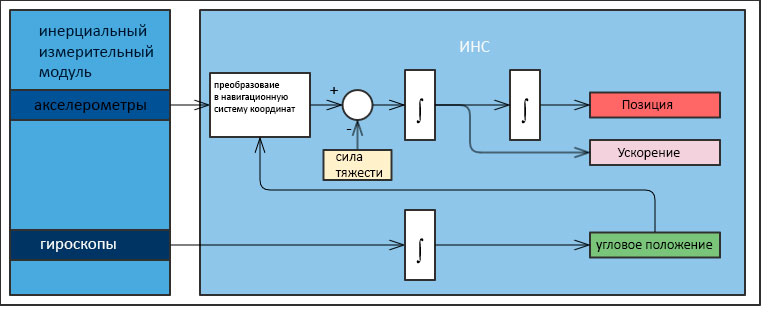
В основе работы ИНС лежат инерциальные датчики: трехосевой акселерометр и трехосевой гироскоп, объединённые в инерциальный измерительный модуль. Гироскопы измеряют угловые скорости, акселерометры — линейные ускорения.
Начиная с известного начального положения и ориентации, ИНС интегрирует показания датчиков во времени, вычисляя текущие углы ориентации, скорость и координаты. При этом алгоритмы постоянно компенсируют смещения нуля, шум и другие ошибки измерений.
Необходимость внешних корректировок
Так как показания акселерометров и гироскопов интегрируются, остаточные ошибки постепенно накапливаются, и погрешность ИНС растет с течением времени.
Чтобы удерживать ошибку на приемлемом уровне, инерциальное решение периодически корректируется по внешним источникам: ГНСС (глобальная навигационная спутниковая система) , магнитометр, одометр, датчики скорости, двухантенные ГНСС ‑приемники для курса и другим вспомогательным системам.
ИНС + ГНСС и другие вспомогательные датчики
Типичная интегрированная навигационная система объединяет ИНС и ГНСС. ИНС обеспечивает высокочастотное, гладкое решение по ориентации и движению, а ГНСС периодически уточняет позицию и скорость, компенсируя дрейф инерциальной системы.
Дополнительно в систему могут включаться магнитометр для курса, одометр колес, дальномеры, доплеровские датчики скорости и другие сенсоры, которые помогают удерживать точность даже в условиях ухудшенного приема спутниковых сигналов.
Слабосвязанная интеграция
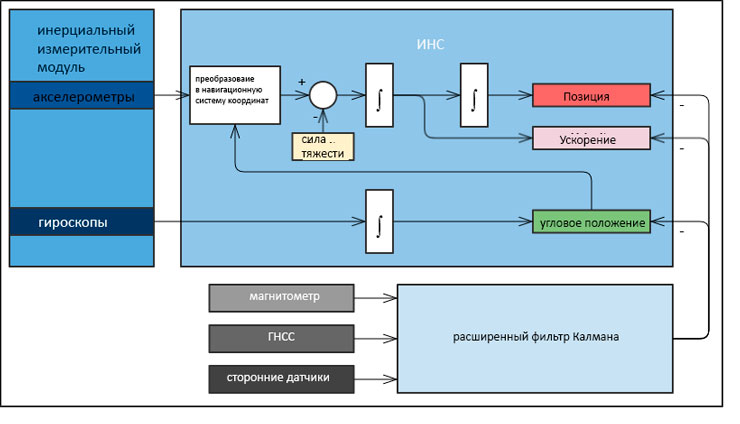
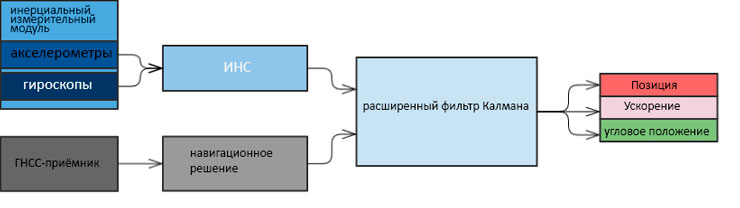
В схеме со слабой связью инерциальная навигационная система напрямую объединяется с навигационными данными ГНСС (положение, скорость) с использованием, как правило, расширенного фильтра Калмана.
Ошибки интеграции ИНС корректируются с помощью входных данных о местоположении ГНСС. Затем расширенный фильтр Калмана выдает точные и стабильные навигационные данные.
Данное решение обладает существенным преимуществом с точки зрения простоты и может работать на миниатюрных устройствах с ограниченными вычислительными мощностями.
Важно понимать, что ГНСС-приемнику также необходимо запускать некоторые внутренние алгоритмы фильтрации (обычно фильтр Калмана) для вычисления навигационного решения. При использовании только данных о местоположении от приемника мы теряем некоторую информацию о фактически наблюдаемых ГНСС-спутниках. Именно поэтому это решение в большей степени зависит от качественной обработки сигнала.
Тесно связанная интеграция
Система с тесной связью ИНС/ГНСС представляет собой более совершенное устройство. В этой схеме приемник вычисляет только «сырые измерения», предоставляя различные значения положения относительно каждого видимого спутника. ГНСС-приемник не использует никаких навигационных фильтров. Все уравнения ГНСС напрямую интегрируются в расширенный фильтр Калмана.
Такой тип интеграции имеет большое преимущество, обеспечивая гораздо более широкие возможности для выявления ошибочных измерений на отдельных спутниках или возможность временной работы с ограниченным числом спутников в поле зрения (<4). Это обеспечивает превосходную устойчивость решения с тесной интеграцией по сравнению с решением со слабой интеграцией.
Основной недостаток метода тесной связи заключается в том, что он плохо подходит для использования с внешними ГНСС-приемниками, которые часто не предоставляют необработанные измерения.
Преимущества ИНС по сравнению с отдельными системами
По сравнению с отдельным ГНСС‑приёмником ИНС обеспечивает высокочастотную ориентацию и навигацию, устойчивую к кратковременным пропаданиям спутникового сигнала, а также точный курс без зависимости от магнитного поля.
По сравнению с простыми системами ориентации (например, только AHRS) ИНС даёт не только углы ориентации, но и полноценную информацию о положении и скорости, что важно для автономных платформ, беспилотных аппаратов и специализированной техники.
Инерциальные навигационные системы SENSSET
SENSSET предлагает линейку инерциальных навигационных систем и модулей на основе МЭМС‑сенсоров, а также комбинированные решения ИНС+ГНСС для задач различной сложности и точности.
- ИНС на базе МЭМС‑сенсоров
- Инерциальная навигационная система SSI‑NS212
- Инерциальная навигационная система SSI‑NS310
Инерциальные навигационные модули (ИНС‑модули)
Для встроенных решений и компактных платформ используются инерциальные навигационные модули, в которых инерциальный измерительный модуль, магнитометр и навигационные алгоритмы объединены в одном корпусе.
Такой модуль формирует готовое решение по ориентации, курсу, линейным ускорениям и другим параметрам движения, упрощая интеграцию в систему управления.
ИНС на лазерных и волоконно‑оптических гироскопах
Для задач, где требуется повышенная точность и минимальный дрейф на длительных интервалах, применяются инерциальные навигационные системы на базе лазерных и волоконно‑оптических гироскопов.
Такие системы обеспечивают высокую стабильность курса и ориентации, поэтому используются в морских, авиационных и специализированных промышленных приложениях.
Области применения ИНС SENSSET
Инерциальные навигационные системы и модули применяются в задачах, где важно точное и устойчивое навигационное решение даже при временном отсутствии ГНСС: на беспилотных летательных аппаратах, наземной технике, морских и речных судах, робототехнических комплексах и промышленном оборудовании.
В зависимости от требований по точности, динамике и условиям эксплуатации можно выбрать компактный инерциальный модуль, ИНС на основе МЭМС‑датчиков или высокоточные системы на лазерных/волоконно‑оптических гироскопах.