Представление ориентации в пространстве
Ориентация в инерциальной навигации: углы, кватернионы и матрицы поворота
В инерциальной навигации и курсовертикалях ориентация объекта в пространстве чаще всего описывается тремя взаимосвязанными способами: углами Эйлера (крен, тангаж, курс), кватернионами и матрицами поворота (DCM). Такой подход используется и в инерциальных системах SENSSET, включая курсовертикали ИМ‑10К, SSAH‑RS220 и ИНС серии SSI‑NS.
Положительное направление вращения
Для всех угловых поворотов применяется правило правой руки. Если большой палец правой руки направлен вдоль положительного направления оси, то положительное вращение соответствует закручиванию остальных пальцев.
Практически это означает, что положительный угол поворота задаётся по часовой стрелке, если смотреть вдоль оси в её положительном направлении.
Углы Эйлера: крен, тангаж, курс
Углы Эйлера — наиболее наглядное представление ориентации. В навигации используется тройка roll–pitch–yaw, которая соответствует крену, тангажу и курсу (рысканию) объекта относительно некоторой фиксированной системы координат (например, локальной NED).
- Крен (φ) — поворот вокруг оси X, обычно задаётся в диапазоне от −π до π.
- Тангаж (θ) — поворот вокруг оси Y, задаётся в диапазоне от −π/2 до π/2.
- Курс / рыскание (ψ) — поворот вокруг оси Z, задаётся в диапазоне от −π до π (или 0…2π в некоторых протоколах).
В изделиях SENSSET (курсовертикали ИМ‑10К, SSAH‑RS220 и ИНС SSI‑NS122/NS212/NS3000) именно эти три угла обычно выдаются пользователю как основной формат ориентации.
Эффект Карданный замок (Gimbal lock)
Последовательное задание ориентации тремя углами создаёт сингулярность, известную как эффект «gimbal lock». Она возникает, когда тангаж θ приближается к ±π/2, оси поворота вырождаются и система теряет одну степень свободы, что приводит к скачкообразному поведению углов.
Из-за этого для систем, работающих в широких диапазонах ориентаций (БПЛА, морские платформы, подвижная техника), углы Эйлера используют в основном как удобный человеко-читаемый выход, а внутренняя математика строится на кватернионах или DCM.
Кватернионы: компактное и устойчивое представление ориентации
Кватернионы — это расширение комплексных чисел, специально удобное для работы с трёхмерными поворотами. Ориентация задаётся четырьмя параметрами: скалярной частью и трёхмерной векторной частью.
Общий вид единичного кватерниона:

Единичный кватернион ∣Q∣=1однозначно задаёт ориентацию в 3D-пространстве без сингулярностей. Обратное вращение задаётся сопряжённым кватернионом: меняется знак векторной части, скалярная остаётся прежней.
Основные преимущества кватернионов для инерциальной навигации:
- Отсутствие эффекта карданного замка и сингулярностей в пространстве ориентаций.
- Эффективная композиция поворотов через умножение кватернионов.
- Простая нормализация для подавления накопленных численных ошибок.
В ИНС и курсовертикалях SENSSET кватернионы часто используются в вычислениях во внутреннем фильтре (EKF/UKF) для оценки ориентации, а уже затем перевoдятся в крен, тангаж и курс на уровне пользовательских протоколов.
Матрица поворота (DCM) и переход между системами координат
Матрица направляющих косинусов (Direction Cosine Matrix, DCM) — это 3×3 матрица, описывающая поворот между двумя ортонормированными системами координат. В задачах инерциальной навигации DCM широко используется для преобразования векторов между корпусной системой координат IMU и локальной навигационной системой NED.
DCM можно представить как произведение трёх элементарных матриц поворота вокруг осей X, Y и Z, соответствующих углам крена φ, тангажа θ и курса ψ:
DCM = RMφ ⋅ RMθ ⋅ RMψ
В развернутом виде это даёт полную ортонормированную матрицу 3×3, элементы которой выражаются через синусы и косинусы углов Эйлера.
Свойства DCM и преобразование векторов
Любая «чистая» матрица поворота ортонормирована, поэтому обратное преобразование равно транспонированию:
DCM−1=DCMT;
Чтобы преобразовать вектор из Декартовой (корпусной) системы координат IMU в локальную NED, используется выражение:
VNED = DCM ⋅ Vbody<.sub>
Обратное преобразование выполняется как:
Vbody = DCMT ⋅ VNED
Так INS и AHRS пересчитывают измеренные IMU ускорения и угловые скорости из декартовой системы координат в навигационный базис.
Преобразования между представлениями ориентации
Кватернионы → матрица поворота (DCM)
По кватерниону Q = (q0, q1, q2, q3) матрица поворота вычисляется так:

Эта формула позволяет напрямую получить DCM из кватерниона и использовать линейную алгебру для преобразования векторов, что реализуется в навигационных алгоритмах INS.
Кватернионы → углы Эйлера
Углы крена, тангажа и курса могут быть восстановлены по компонентам кватерниона следующим образом:
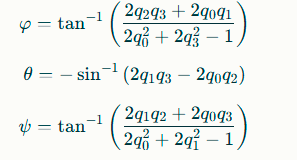
Такие преобразования используются, когда внутренняя оценка ориентации хранится в виде кватерниона, а пользователю или протоколу связи нужны классические углы Эйлера.
DCM → углы Эйлера
Если ориентация задана матрицей поворота DCM, углы можно вычислить по её элементам:
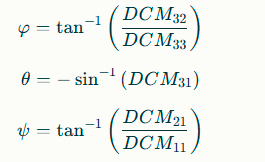
Эти формулы применяются в INS и курсовертикалях при необходимости выдать ориентацию в виде крена, тангажа и курса на основе «внутренней» матрицы поворота.
WebGL демонстрация
Как это реализовано в продуктах SENSSET
- Курсовертикали (AHRS) ИМ‑10К и SSAH‑RS220
Вычисляют ориентацию по данным IMU, внутренне используют матрицы поворота и/или кватернионы, а на выходе предоставляют углы крена, тангажа и курса. - ИНС на МЭМС‑сенсорах (серия SSI‑NS, например SSI‑NS122)
Хранят ориентацию в устойчивом виде (DCM/кватернион), формируют навигационное решение в NED и WGS‑84 и параллельно выдают крен, тангаж и курс. - Высокоточные INS на ВОГ ( SSI‑NS3000)
Работают в широком диапазоне ориентаций, где gimbal lock особенно критичен, используют кватернионы и матрицы поворота во внутренних EKF‑алгоритмах для устойчивой оценки ориентации и минимизации дрейфа.
