Система определения положения и курса (AHRS)
Принцип
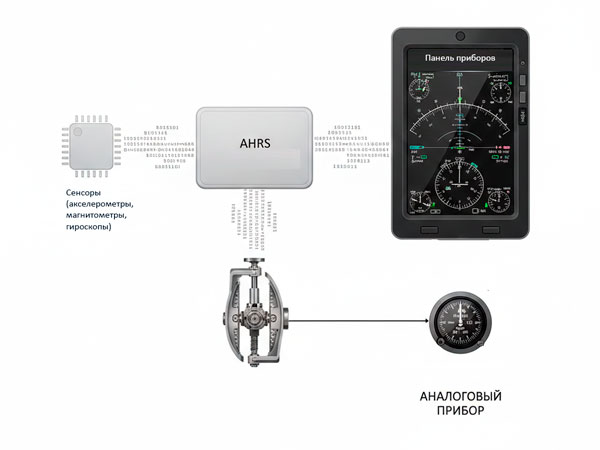
Система определения ориентации и курса (AHRS) — это инерциальный датчик, состоящий из инерциального измерительного блока (IMU) и другого датчика, используемого для определения курса (обычно магнитометра).
Для стабилизации инерциального измерительного блока (IMU) используется вертикальная точка отсчета (гравитация). Данные гироскопов объединяются с измерениями гравитации от акселерометров в фильтре Калмана для определения углов крена и тангажа. Для расчета курса можно использовать вспомогательный датчик, например, магнитометр или двухантенный GNSS-приемник.
Система AHRS использует преимущества гироскопов для обеспечения точных показаний крена, тангажа и рыскания в условиях низкой и средней динамики. Кроме того, она очень проста в настройке и использовании.
Однако общая точность может снизиться в динамической или магнитно-возмущенной среде из-за невозможности отличить ускорения от гравитационного (вертикального) эталона.
