Установка инерциальных датчиков (IMU)
Ниже приводятся рекомендации по правильной механической установке и учёту внешних факторов, которые влияют на работу инерциальных датчиков и навигационных систем.
Стандартная механическая установка
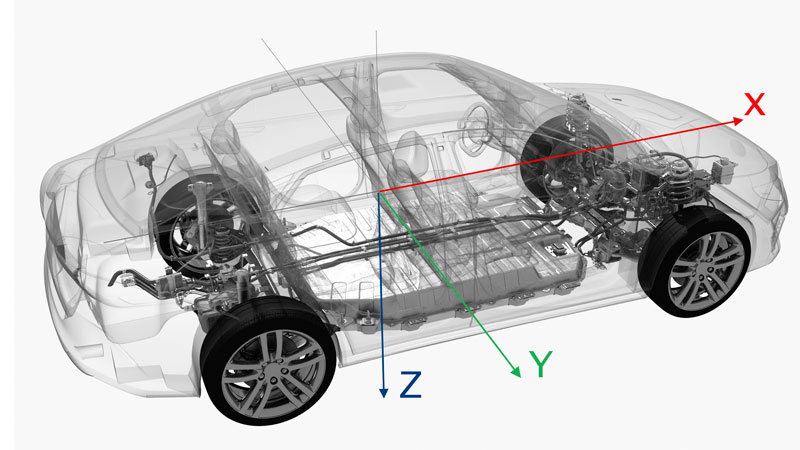
Инерциальный датчик (IMU) устанавливается так, чтобы его оси были ориентированы в системе координат носителя. В большинстве случаев ось X направляется в сторону движения вперёд, а ось Z — вниз. Это обеспечивает прямую связь измеряемых ускорений и угловых скоростей с движением носителя.
Если точное механическое совмещение невозможно, необходимо измерить несоосность IMU относительно системы координат носителя и использовать это значение при настройке параметров в программном обеспечении или прошивке навигационной системы.
Датчик можно установить в любой части корпуса, но рекомендуется располагать его в пределах около 10 м от центра вращения носителя. Это снижает ошибки, возникающие при динамических движениях и вращениях. Дополнительно требуется измерить главное плечо (signed distance) между центром измерения датчика и центром вращения, с точностью не хуже ±5 см, выраженное в системе координат носителя.
Такой подход применяется, например, при установке профессиональных навигационных систем на транспортные средства, робототехнические платформы и сложные устройства.
Пример продукции, где такие рекомендации применимы: SSI-NS207 инерциальная навигационная система — высокоточный модуль IMU на основе МЭМС, предназначенный для автономной навигации и стабилизации в сложных условиях.
Вибрации и их влияние
Инерциальные датчики обычно используют МЭМС-акселерометры и гироскопы с высоким уровнем фильтрации и частотой выборки, что снижает влияние вибраций. Однако сильные вибрации могут приводить к искажениям показаний акселерометров — этот эффект называют VRE (Vibration Rectification Error). При очень интенсивных вибрациях датчик может насыщаться, что приводит к значительным ошибкам ориентации и движения.
Чтобы уменьшить влияние вибраций, датчик желательно механически изолировать от источников вибраций (например, использовать демпферы или виброподвесы при монтаже). Это особенно важно в динамических приложениях и на транспортных средствах с высокими уровнями вибраций.
Пример инерциального модуля, устойчивого к вибрациям, — SSI-MU16460 инерциальный измерительный модуль, компактное промышленное решение на основе MEMS-датчиков с полной калибровкой и стабильной работой в широком диапазоне условий.
Влияние магнитных полей
Если внутри IMU используется магнитометр для определения курса, следует учитывать влияние внешних магнитных полей. Большие металлические конструкции, силовые кабели и другие магнитные источники могут искажать поле вокруг датчика и приводить к ошибкам.
Рекомендуется размещать датчик как можно дальше от мощных источников помех (по возможности более 2 м). Кроме того, выполняется калибровка магнитометра для компенсации постоянных магнитных искажений (Hard iron) и искажений, вызванных магнитомягкими материалами (Soft iron).
Калибровка магнитометра проводится в процессе настройки навигационного решения. На страницах некоторых продуктов представлены описания процедур компенсации магнитных искажений.
Например, для навигационных систем семейства SSI-NS используются алгоритмы фильтрации и компенсации помех, встроенные в прошивку с возможностью настройки через ПО. Пример продукта: SSI-NS207 инерциальная навигационная система.
Кратковременные магнитные помехи (например, от проходящей техники или работающего оборудования) часто компенсируются встроенными алгоритмами фильтрации. Однако при длительном воздействии направление магнитного поля может переустанавливаться, влияя на направление курса.
В случае, когда магнитометр не используется (например, система работает только на основе IMU + внешнего ГНСС), влияние магнитных полей на работу IMU значительно ниже, но всё же сильные магнитные воздействия нежелательны.
Применимость рекомендаций
Указанные рекомендации актуальны для широкого спектра инерциальных решений, включая:
- SSI-NS207 инерциальная навигационная система — высокоточный IMU/INS модуль для автономной навигации.
- SSI-MU16460 инерциальный измерительный модуль — промышленное решение с MEMS-датчиками.
- SSI-MU99HP инерциальный модуль — 10 DoF IMU с магнитометром и альтимером.
- SSI-MU200 блок чувствительных элементов — тактический МЭМС IMU.
Эти модули и системы используют одни и те же базовые принципы установки и калибровки, описанные выше. Правильная механическая ориентация, минимизация вибраций и учёт магнитных влияний обеспечивают оптимальную работу инерциальной навигационной системы.
